Models of the brain usually address relatively small sub-components and sub-systems. So far it has not been possible to show how these subsystems are actually working together in a living brain engaging with the real world. Now for the first time members of SPECS research lab. have succeeded in realizing a whole brain model that controls rodent-like behaviour of a robot in real time. This has been achieved by virtue of a focused research programme, that combines neuroscience, psychology, artificial intelligence and robotics, by SPECS at the Centre of Autonomous Systems and Neurorobotics (N-RAS) of UPF led by ICREA professor Paul Verschure spanning more than 20 years investigating the Distributed Adaptive Control (DAC) theory of mind and brain.
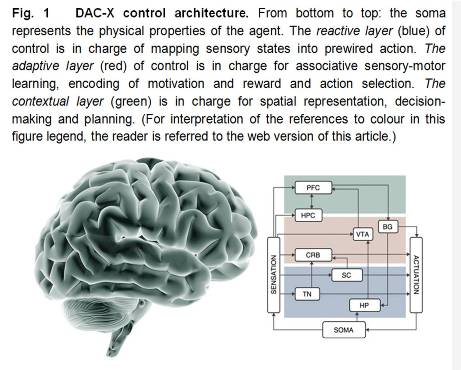
The DAC theory proposes that animals deal with real world tasks such as foraging and hoarding by satisfying 5 top-level objectives called: “how”, “why”, “what”, “where” and “when” or the H4W problem (Verschure, 2012).
This form of complex behavior includes: to learn where and when to look for resources, what to look for, where and when to return to the home base, how to avoid obstacles and how to act in order to satisfy internal needs. But how does brain organization and underlying neural principles account for these complex behaviors and their coordination?
Research carried out by SPECS’ members including lead author Giovanni Maffei, Diogo Santos-Pata, Encarnación Marcos, Martí Sánchez-Fibla, and PFMJ. Verschure, have looked at fundamental learning paradigms of classical and operant conditioning and how these are realized by core brain systems such as the cerebellum, hippocampus and neocortex. So far, biologically constrained models of these systems had been elaborated. The authors have managed for the first time to bring these components together in the DAC-X model gaining new insights in how the interaction between brain systems is coordinated. The DAC-X model is not only unique because of its biological detail but also because of its ability to control a robot in real-time facilitating an understanding of the realistic dynamics of brains as they engage with the real world.
The DAC-X robot experiments focus on fundamental behavior o foraging and hoarding. The experiments done using mobile robots show that a naïve agent foraging in a new environment needs to acquire multiple kinds of knowledge, from sensory-motor associations to landmarks and goal oriented strategies. In particular, the agent learns over time to rely on local environmental cues to find useful resources and acquires the navigational planning skills that support efficient decision making, leading to an increase of behavioural efficiency, observed in terms of the overall cost-reward ratio. The DAC-X model shows in detail how concurrently core brain systems contribute to this complex task: the hypothalamus defining the dominant needs, the cerebellum shaping specific action patterns to negotiate the environment, the hippocampus performing internal simulations of potential routes with the prefrontal cortex setting the specific behavioral goals. This work sheds light on the synergies between multiple learning systems in the brain and how these could lead to coherent behavioural outcomes observed in rodents and other mammals.
The objective of DAC-X and the whole DAC series of models is to render whole brain models that can assist us in understanding the brain in health and disease giving rise to novel control methods for robots and better diagnostics and interventions in the clinic. The SPECS group has already made the first steps in this direction by the DAC grounded approach to stroke rehabilitation called the Rehabilitation System.
Acknowledgment:
The research leading to these results has received funding from the European Research Council under the European Union’s Seventh Framework Programme (FP7/2007–2013)/ERC grant agreement no [341196] cDAC, the European Commission’s Seventh Framework Programme ([FP7/2007–2013] under grant agreement no [612139]) WYSIWYD, the European Commission’s Seventh Framework Programme ([FP7/2013-2016] under grant agreement no [601167]) CSN II and the European Commission’s Horizon 2020 socSMC (under agreement number: socSMC-641321H2020-FETPROACT-2014).
Reference:
Giovanni Maffei, Diogo Santos-Pata, Encarni Marcos, Marti Sánchez-Fibla, Paul F.M.J. Verschure (2015), "An embodied biologically constrained model of foraging: From classical and operant conditioning to adaptive real-world behavior in DAC-X", Neural Network. Available online 30 October 2015

AtCDF3 gene induced greater production of sugars a...

Un estudio con datos de los últimos 35 años, ind...
Un equipo de investigadores de la Universidad Juli...
En nuestro post hablamos sobre este interesante tipo de célula del...

Horizon ha puesto en funcionamiento una nueva planta dedicada íntegra...