Investigadores del Centro de Automática y Robótica, centro mixto del Consejo Superior de Investigaciones Científicas (CSIC) y la Universidad Politécnica de Madrid, han desarrollado un método basado en técnicas de inteligencia artificial para el modelado y la verificación automática de sensores LIDAR en el Internet de las Cosas (IoT) en los vehículos de conducción autónoma, así como para la evaluación de su seguridad. Este trabajo se han realizado en el marco del proyecto europeo IoSENSE: Flexible FE/BE Sensor Pilot Line for the Internet of Everything.
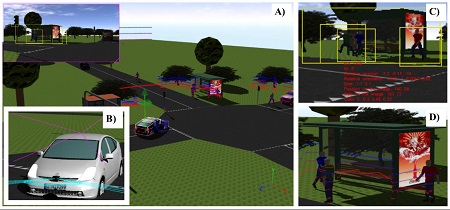
“Hemos modelado y evaluado un sensor LiDAR en el Internet de las cosas (IoT) especializado en detectar obstáculos y de compartir esa información con otros vehículos y así evitar posibles colisiones. En la actualidad, la evaluación de la detección de obstáculos mediante sensores LiDAR se ha convertido en un tema clave que la comunidad científica está explorando activamente”, explica el investigador Rodolfo Haber, del Centro de Automática y Robótica.
La participación del CSIC en este proyecto ha estado centrada también en el desarrollo e implementación de un demostrador de Movilidad Inteligente en el que se ha evaluado el comportamiento del sensor LiDAR en vehículos reales y virtuales, gracias a la herramienta de simulación desarrollada. El demostrador ha permitido la realización de ensayos en entornos reales de conducción en un vehículo altamente automatizado.
“Las técnicas avanzadas de modelado y control basadas en técnicas de inteligencia artificial y los sistemas ciberfísicos tendrán un gran impacto a corto plazo en las nuevas capacidades de procesamiento y de toma de decisión que tendrán los sensores no solo en los sistemas inteligentes de transporte, sino también en el futuro de la Industria 4.0”, añade el investigador del CSIC.
Los nuevos dispositivos desarrollados durante esta iniciativa, que ha durado tres años y en la que han participado investigadores de Alemania, Austria, Bélgica, España y Eslovaquia, pasarán en los próximos meses a la fase de comercialización de la mano de una de las empresas socias del proyecto.

La mejor actitud que podemos adoptar es la de trat...

The research team observed changes in head circumf...

AtCDF3 gene induced greater production of sugars a...
En nuestro post hablamos sobre este interesante tipo de célula del...

New study finds an association between higher temperatures early in li...